Inżynierowie z firmy Astronika na zlecenie Europejskiej Agencji Kosmicznej pracują nad alternatywą dla łazików księżycowych, bo te nie zawsze są w stanie poradzić sobie w trudnym terenie. Rozwiązaniem mogącym zastąpić łaziki może być księżycowy skoczek, który nie będzie miał problemów w eksploracji górzystych terenów. Polscy specjaliści opracowali już mechanizm nóg skoczka.
W ubiegłym tygodniu w Centrum Badań i Technologii Kosmicznych Europejskiej Agencji Kosmicznej (ESA-ESTEC) w Holandii polscy inżynierowie z firmy Astronika zaprezentowali ukończony mechanizm nogi skoczka księżycowego. Taki skoczek nie powinien mieć problemów w regionach górzystych, które kryją najwięcej ciekawych dla naukowców informacji o innych ciałach niebieskich, a w których tradycyjne łaziki sobie nie radzą.
W pierwszej fazie projektu opracowane, wykonane i przetestowane zostały nogi skoczka. Jak łatwo się domyślić, ich mechanizm jest kluczowy dla działania całego robota. Po udanej prezentacji inżynierowie z Astroniki liczą na kontynuację projektu i zlecenie przez ESA wykonania pełnego modelu, docelowo z przeznaczeniem na misje księżycowe i planetarne. Już na tym etapie można powiedzieć, że jest to bardzo prawdopodobne, zwłaszcza że w tej dekadzie planowanych jest bardzo wiele misji na Księżyc i asteroidy.
Technologia, którą opracowali Polacy jest teraz bardzo pożądana, bo rozwiązuje wiele problemów z jakimi spotykały się dotychczasowe misje lądujące na ciałach niebieskich (np. przewrócone lądowniki, lądowania w trudniejszym niż przewidywany terenie). Co ważne, testowane dotąd roboty skaczące innych producentów, ze względu na małą energię skoku, mogły skutecznie przemieszczać się jedynie w mikrograwitacji i tej samej technologii nie można zastosować na Księżycu czy Marsie. Inne bazują na wieloczłonowych kroczących konstrukcjach, ale przez to wymagają zużycia dużo energii w krótkim czasie, co skraca czas operacyjny i ogranicza eksplorację większego terenu. Skoczek Astroniki jest bardzo lekki (mniej niż 10kg), efektywny energetycznie i ma osiągać na Księżycu skoki na wysokość nawet powyżej 3 metrów.
Nasze rozwiązanie wykorzystuje koncepcję odpychania się od powierzchni za pomocą lekkich nóg tak jak robi to konik polny. Raz zaprojektowany do grawitacji księżycowej, jest łatwo skalowalny także do mniejszych grawitacji. Nasza konstrukcja bazuje na prostocie i wytrzymałości, przy bardzo małym poborze mocy – mówi Łukasz Wiśniewski, kierownik projektu.
Polscy inżynierowie są jednymi z pionierów w rozwoju tej innowacyjnej technologii – właśnie oni mogą dokonać przełomu w sposobie eksploracji ciał niebieskich. To dobra wiadomość dla całego polskiego sektora kosmicznego, ponieważ projektowanie i budowa od A do Z robotów skaczących dedykowanych różnym misjom będzie wymagała współpracy wielu podmiotów, a co za tym idzie, będziemy mieli okazję budować unikalny know-how i naszą narodową specjalizację.
Prace nad technologią skoczka zostały sfinansowane przez Europejską Agencję Kosmiczną w ramach programu PLIIS (Polish Industry Incentive Scheme) we współpracy z Centrum Badań Kosmicznych PAN i były możliwe dzięki dobrej koordynacji pomiędzy polskim sektorem kosmicznym a Ministerstwem Rozwoju i Technologii oraz Polską Agencją Kosmiczną.
Podczas misji księżycowej skoczek będzie realizował takie zadania jak: charakteryzacja pyłu księżycowego, pomiary spektrometryczne, badanie stężenia hydrazyny, fotografowanie lądownika-matki z różnych perspektyw oraz analiza nośności powierzchni. Dzięki wykorzystaniu unikalnej zdolności do skoków oraz zestawowi kamer, robot będzie również badał właściwości mechaniczne oraz morfologię regolitu.
Wszystkie te działania powiększą naszą wiedzę o wpływie regolitu na mobilność planetarną, a w konsekwencji, z pomocą niewielkiego zasobu jakim jest Skoczek, wpłyną na bezpieczeństwo, planowanie oraz obniżą koszt przyszłych misji kosmicznych.
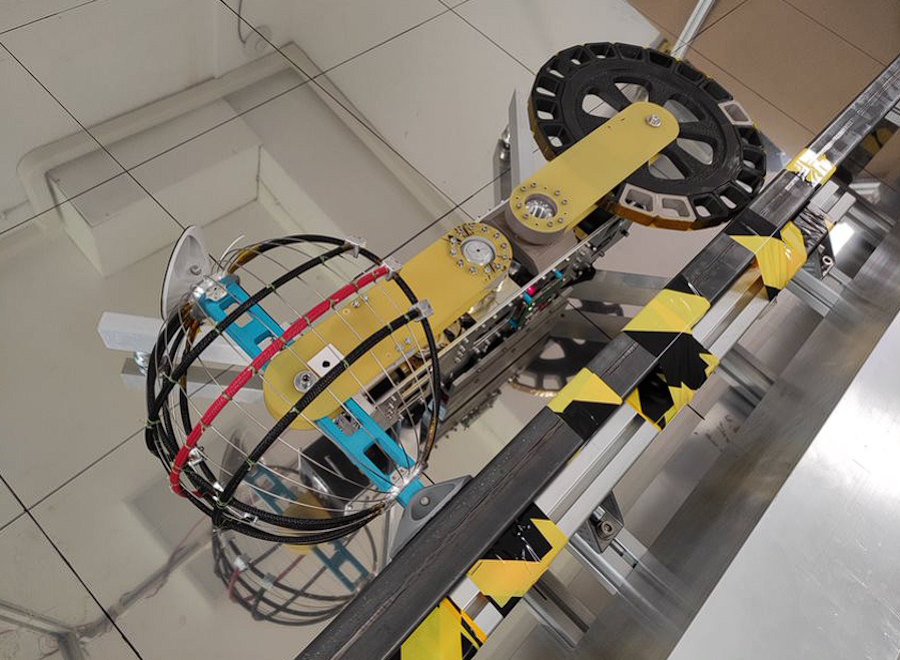
Ostateczna konfiguracja będzie potwierdzona w kolejnym etapie rozwoju platformy, ale jednym z założeń jest połączenie funkcji kół z funkcją skaczących nóg: koło będzie umieszczone na nodze, która w razie potrzeby umożliwi odbicie się wysoko w powietrze za pomocą już opracowanego aktuatora.
Dotychczas większość misji eksploracyjnych planowanych było bardzo zachowawczo. Łaziki i lądowniki wysyłano tylko na stosunkowo płaski, bezpieczny teren, który niestety daje informację naukową tylko na temat najświeższej historii ciała niebieskiego (a i tak często maszyny te lądowały w nieprzewidzianie trudnych warunkach albo przewracały się i stawały się powoli bezużyteczne!). Dużo ciekawsze jest dostarczenie instrumentów naukowych w tereny trudno dostępne, np. klify, skały i kaniony, w których widać przekrój historii ciała niebieskiego. Nikt jednak nie odważy się wysłać łazika wartego kilkaset milionów euro w potencjalnie samobójczą misję. Mały robot skaczący jest stosunkowo niedrogi dla misji i łatwo go zabrać na pokład. Jest niczym sprytny i pomocny skaut, który może wykonać zwiad w ryzykownym terenie, zanim wjedzie tam łazik. Nie tylko zwiększa bezpieczeństwo całej misji, ale też maksymalizuje jej zwrot naukowy. Dodatkowo dostarcza cennej informacji nt. właściwości mechanicznych powierzchni, co pozwala zwiększać dokładność planowania ruchu. Jeżeli Skoczek gdzieś ugrzęźnie, to nie szkodzi! Takie właśnie jest jego zadanie, aby dotrzeć tam, gdzie jeszcze nikt nie próbował i wykonać pionierskie pomiary. Jednocześnie misja nie utraci zdolności wykonania swoich głównych celów poprzez lądownik-matkę czy łazik-matkę – opowiada Łukasz Wiśniewski, kierownik projektu.
Źródło i fot.: Astronika. Na zdjęciu prototyp nogi skoczka








