Podczas szóstego lotu Ingenuity na Czerwonej Planecie doszło do poważnej usterki systemu nawigacyjnego śmigłowca. Ingenuity pokonał zaplanowaną trasę i nawet zdołał bezpiecznie wylądować, ale większość drogi przebył kołysząc się w przód i w tył.
W 91. marsjańskim dniu misji Mars 2020 helikopter Ingenuity wykonał swój szósty lot. W locie tym miał zademonstrować możliwości obrazowania z powietrza poprzez wykonanie zdjęć stereo interesującego naukowców regionu. Plan zakładał wzniesienie się Ingenuity na wysokość 10 metrów, a następnie podróż na odległość 150 metrów w kierunku południowo-zachodnim. Kolejnym etapem miał być lot o długości 15 metrów na południe, by następnie skierować drona o kolejne 50 metrów na północny-wschód, gdzie Ingenuity miał wylądować.
Plan został zrealizowany, ale nie obyło się bez przygód. Przesłane na Ziemię dane z szóstego lotu pokazują, że pierwsza, 150 metrowa część podróży przebiegła bez żadnych problemów, ale gdy Ingenuity miał ruszyć w kierunku zachodnim, dron zaczął się niebezpiecznie kołysać, przechylając się w przód i w tył. W ten sposób pokonał resztę trasy i nawet zdołał bezpiecznie wylądować. Czujniki pokładowe wskazały duże skoki w zużyciu energii. Pokazały też, że wirniki drona przechylały się podczas lotu nawet o 20 stopni.
W powietrzu Ingenuity śledzi swój ruch za pomocą wbudowanego urządzenia (Inertial Measurement Unit – IMU), które mierzy przyspieszenia i prędkości obrotowe wirnika Ingenuity. Dzięki integracji tych informacji w czasie możliwe jest oszacowanie pozycji, prędkości i położenia helikoptera (gdzie się znajduje, jak szybko się porusza i jak jest zorientowany w przestrzeni). Pokładowy system sterowania reaguje na te informacje. Ale dron polega też na obrazach z kamer. Kamery nawigacyjne zamontowane na spodzie śmigłowca wykonują 30 zdjęć na sekundę i natychmiast przesyłają je do systemu nawigacyjnego helikoptera.
Za każdym razem, gdy pojawia się obraz, algorytm systemu nawigacyjnego wykonuje serię działań: najpierw sprawdza sygnaturę czasową, którą otrzymuje wraz ze zdjęciem, aby określić, kiedy zdjęcie zostało zrobione. Następnie algorytm przewiduje, co kamera powinna była zobaczyć w danym momencie, biorąc pod uwagę cechy powierzchni, które może rozpoznać na podstawie poprzednich zdjęć wykonanych chwilę wcześniej. Na koniec sprawdza, gdzie te cechy faktycznie pojawiają się na obrazie. Algorytm nawigacji wykorzystuje różnicę między przewidywaną i rzeczywistą lokalizacją tych obiektów, aby skorygować swoje oszacowania pozycji, prędkości i położenia.
Po około 54 sekundach lotu doszło do usterki w przesyłaniu obrazów z kamery nawigacyjnej. Jedno ze zdjęć nie zostało dostarczone do systemu nawigacyjnego. To doprowadziło do tego, że wszystkie późniejsze obrazy były dostarczane z wadliwymi sygnaturami czasowymi. Od tego momentu za każdym razem, gdy algorytm nawigacyjny dokonywał korekty na podstawie obrazu nawigacyjnego, działał na podstawie błędnych informacji o czasie wykonania zdjęcia. Wynikające z tego niespójności spowodowały problemy z lotem, prowadząc do ciągłego korygowania informacji nawigacyjnych w celu uwzględnienia błędów.
Pomimo napotkanych trudności Ingenuity był w stanie utrzymać lot i bezpiecznie osiąść na powierzchni w odległości około 5 metrów od planowanego miejsca lądowania. - Zaprojektowaliśmy Ingenuity tak, aby tolerował błędy bez utraty stabilności. Ten wbudowany mechanizm nie był potrzebny w poprzednich lotach Ingenuity, ponieważ zachowanie pojazdu było zgodne z naszymi oczekiwaniami, ale przyszedł na ratunek w podczas ostatniego lotu – zaznaczył Håvard Grip, główny pilot helikoptera Ingenuity.
Całe szczęście Ingenuity poradził sobie z problemami i zdołał bezpiecznie wylądować. Cała sytuacja uwidoczniła usterkę, którą trzeba będzie usunąć, ale pokazała również, że inne systemy zostały solidnie opracowane i sprawdzają się w trudnych, marsjańskich warunkach. Inżynierowie z NASA dostali informacje o mankamentach oprogramowania. Dane te zostaną dokładnie przeanalizowane i być może dzięki nim przyszłe projekty maszyn opracowywanych do lotów na innych planetach będą znacznie lepsze.
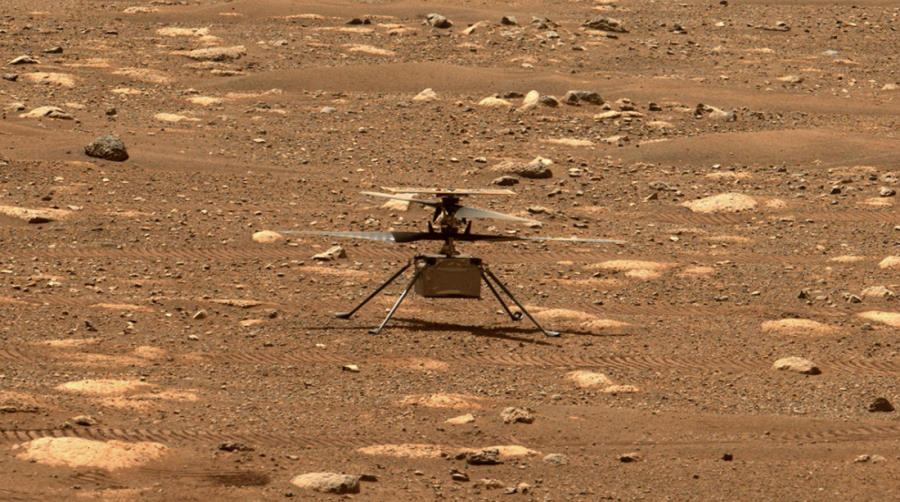
Dron Ingenuity jest pierwszym pojazdem latającym wysłanym na inną planetę. Ważący niecałe dwa kilogramy wiropłat wylądował na Marsie 18 lutego przyczepiony do „brzucha” łazika Perseverance. Został zaprojektowany jako maszyna testowa dla nowej technologii i nie zawiera on żadnych instrumentów naukowych. Mały, autonomiczny wiropłat ma badać Czerwoną Planetę z powietrza.
Kadłub śmigłowca ma rozmiary nieco większe od piłki do tenisa. Jego obracające się w przeciwnym kierunku płaty mogą osiągać w cienkiej marsjańskiej atmosferze prędkość prawie 3000 obrotów na minutę. To około 10 razy szybciej niż ziemskie śmigłowce.
Kontrolowany lot na Marsie jest znacznie trudniejsze niż latanie w warunkach ziemskich. Czerwona planeta ma grawitację około jednej trzeciej grawitacji ziemskiej, ale jej atmosfera ma zaledwie jeden proc. gęstości ziemskiej atmosfery na powierzchni.
Głównym celem misji Perseverance na Marsie jest poszukiwanie oznak pradawnego mikrobiologicznego życia. Choć obecnie planeta jest zimna i sucha, to w odległej przeszłości, jak uważają badacze, była ciepła i wilgotna, a takie warunki mogły sprzyjać powstaniu życia.
Źródło i fot.: NASA